
Materiale necessario:
- FC brushed (F3 EVO BRUSHED Flight Controller for small FPV Drones)

- ricevente rx (scelta in base al vostro radiocomando) (io ho adottato una ricevente flsky FS-IA6B sgusciata per ridurre il peso)

- motori coreless (hubsan x4 h170 8x20mm consigliati)

- fpv camera (all in one tx+camera eachine tx-02 200mw)

- batteria 1s (500mah )
- frame (carbon frame)(io ho stampato in pla un frame leggero )




Prestagnamo i pin che andremo ad utilizzare nella nostra flight control board ossia la “centralina” del nostro quadricottero,

prendiamo il telaio e inseriamo i motori negli appositi scompartimenti
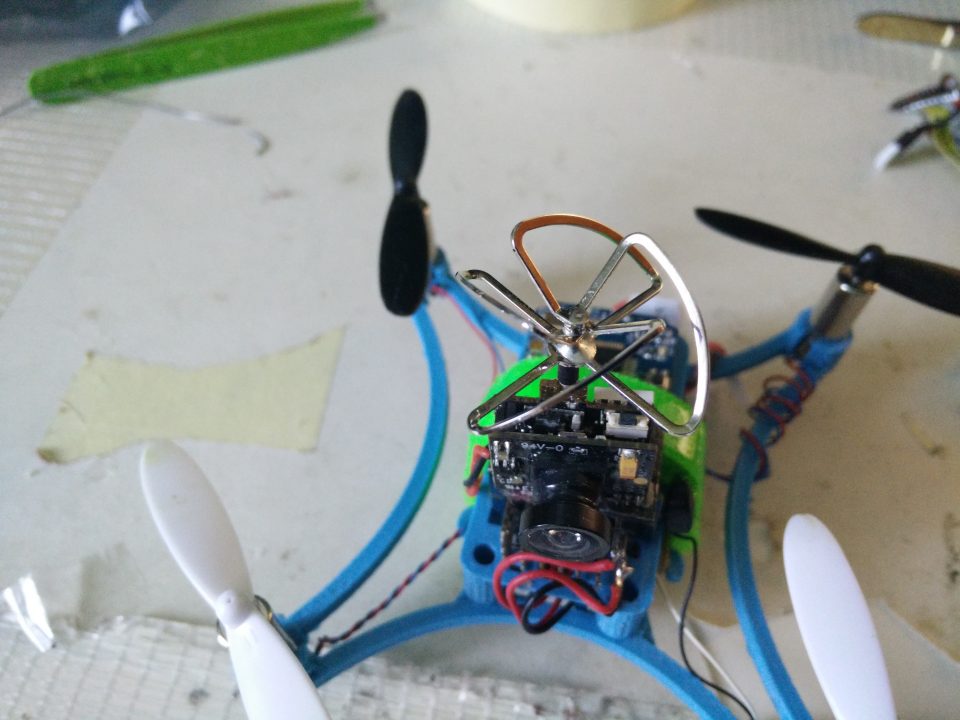
alloggiamo la scheda di controllo del nostro veivolo in centro con la freccia di direzione rivolta verso l’ anteriore meglio fissarla con una spugnetta adesiva in modo da proteggere la stessa dagli urti e di isolare i contatti della PCB che è buona regola prevenire prima di curare il danno, eseguire le stagnature dei due fili provenienti dai  motori positivo negativo rispettivamente rosso-blu ebianco-nero agli appositi pin nella scheda ricordando di invertire le polarità per i motori che dovranno girare in senso antiorario o ccw. Assembliamo le rispettive eliche ai mini alberi dei motori facendo attenzione al verso di rotazione eseguendo una leggera pressione fino a sentire un piccolo click che ci avverte che l’ elica é incastrata correttamente e nel suo punto più estremo.
motori positivo negativo rispettivamente rosso-blu ebianco-nero agli appositi pin nella scheda ricordando di invertire le polarità per i motori che dovranno girare in senso antiorario o ccw. Assembliamo le rispettive eliche ai mini alberi dei motori facendo attenzione al verso di rotazione eseguendo una leggera pressione fino a sentire un piccolo click che ci avverte che l’ elica é incastrata correttamente e nel suo punto più estremo.

Per questo specifico caso é stata utilizzata una ricevente 2.4ghz a segnale S-BUS , scelta che ci garantirà il contenimento del peso avendo un unico cavo di segnale e 2 di alimentazione, stagnamoli direttamente ai pin
 per il prossimo passo di installazione della videocamera possiamo seguire questa pagina che tratta di questo specifico passaggio finale…http://gstechnoblog.altervista.org/micro-fpv-eachine-e010-fpvmod/
per il prossimo passo di installazione della videocamera possiamo seguire questa pagina che tratta di questo specifico passaggio finale…http://gstechnoblog.altervista.org/micro-fpv-eachine-e010-fpvmod/